Paper in IROS 2012: "Linguistic Transfer of Human Assembly Tasks to Robots"
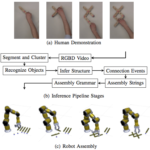
Citation Abstract We demonstrate the automatic transfer of an assembly task from human to robot. This work extends efforts showing the utility of linguistic models in verifiable robot control policies by now performing real visual analysis of human demonstrations to automatically extract a policy for the task. This method tokenizes each human demonstration into a […]